torchfilter.base._kalman_filter_base
Private module; avoid importing from directly.
Module Contents
Classes
Base class for a generic Kalman-style filter. Parameterizes beliefs with a mean |
- class torchfilter.base._kalman_filter_base.KalmanFilterBase(*, dynamics_model: DynamicsModel, measurement_model: KalmanFilterMeasurementModel, **unused_kwargs)[source]
Bases:
torchfilter.base.Filter,abc.ABC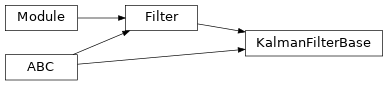
Base class for a generic Kalman-style filter. Parameterizes beliefs with a mean and covariance.
Subclasses should override
_predict_step()and_update_step().- dynamics_model
Forward model.
- measurement_model
Measurement model.
- forward(self, *, observations: types.ObservationsTorch, controls: types.ControlsTorch) types.StatesTorch[source]
Kalman filter forward pass, single timestep.
- Parameters:
observations (dict or torch.Tensor) – Observation inputs. Should be either a dict of tensors or tensor of shape
(N, ...).controls (dict or torch.Tensor) – Control inputs. Should be either a dict of tensors or tensor of shape
(N, ...).
- Returns:
torch.Tensor – Predicted state for each batch element. Shape should be
(N, state_dim).
- initialize_beliefs(self, *, mean: types.StatesTorch, covariance: types.CovarianceTorch) None[source]
Set filter belief to a given mean and covariance.
- Parameters:
mean (torch.Tensor) – Mean of belief. Shape should be
(N, state_dim).covariance (torch.Tensor) – Covariance of belief. Shape should be
(N, state_dim, state_dim).